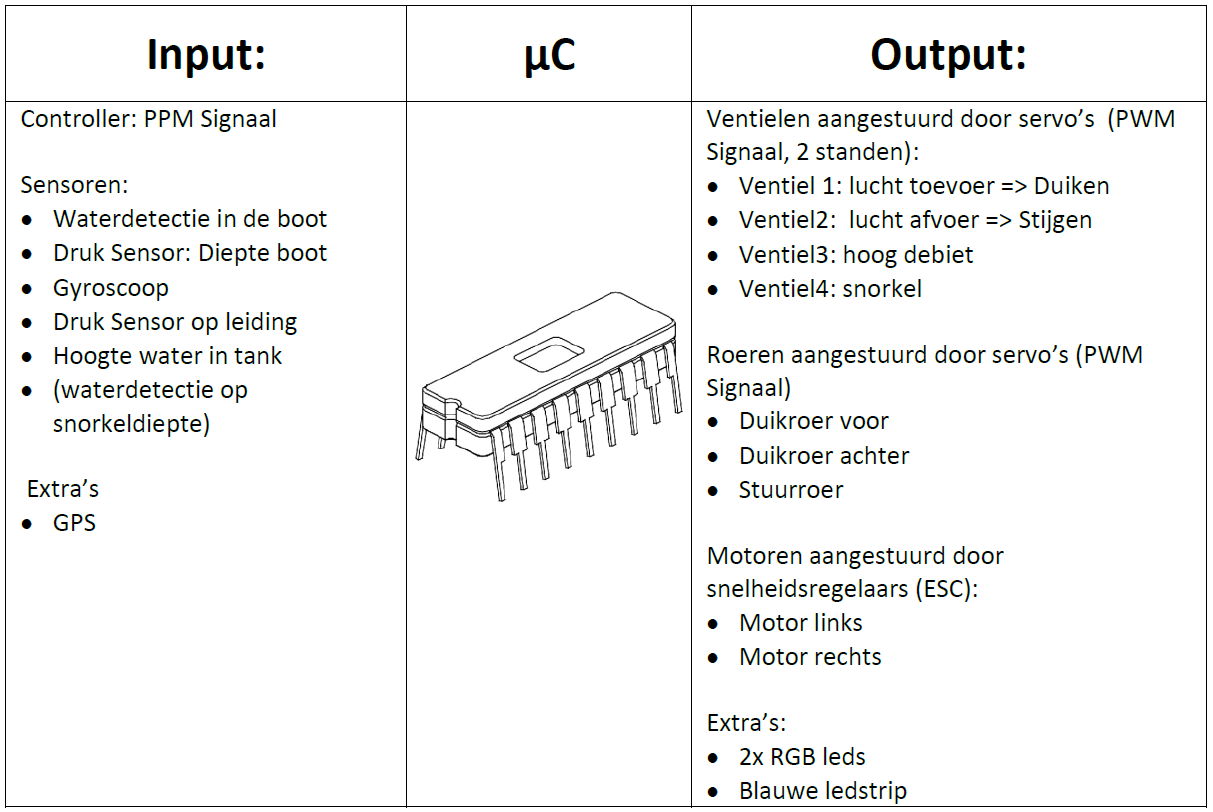
Nu we het PPM signaal kunnen binnen lezen hebben we ons toegespitst op de gyroscoop en de accelerometer. Beide componenten worden gebruikt om de hoek te meten. Met de gyroscoop meten we een hoeksnelheid waarbij we de hoek kunnen afleiden door de versnelling te vermenigvuldigen met de tijd. De accelerometer heeft de versnelling weer in de XYZ richting. Daardoor zal er door de zwaartekracht voortdurend een hoek kunnen worden bepaald. De accelerometer heeft als nadeel dat het component nogal gevoelig is voor trillingen. Ook meet de accelerometer ongewenste versnellingen. Het nadeel van de gyroscoop is dat er na een tijdje drift optreedt. Dit is een verschijnsel waarbij de gyroscoop niet terugkomt naar zijn nulwaarden in rustpositie. We laten de hoek van de gyroscoop voor 98% meetellen en de hoek van de accelerometer voor 2%.
In de video hieronder ziet u een simulatie waarbij we de trimtanks aansturen. Als de hoek waaronder de boot staat te groot wordt, zal er in de trimtaks water van de ene naar de andere kant worden gepomp om de hoekverdraaiing van de boot tegen te gaan. De pomp is via een H-brug verbonden aan onze microcontroller.